
Мы с нетерпением ждем возможности предоставить вам профессиональные услуги.-Лидер Чжунда


-
-
-
Редукторный двигатель переменного тока
ZDF2 、 ZDF3 гипоидный мотор-редуктор
Колесный редуктор RV Cycloidal Pin
ПРОДУКЦИЯ
по слову:Редукторный двигатель переменного тока
Деталь
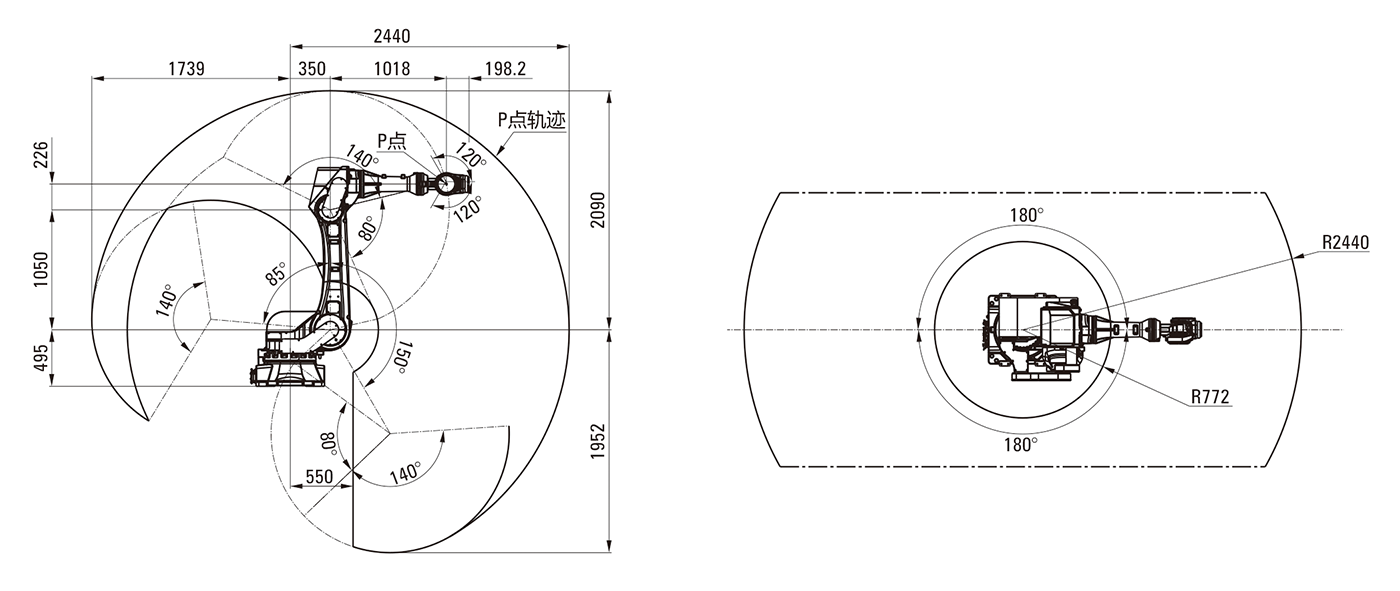
Модель робота ZDGT10024 Свобода 6 Позиция Наземная установка и подвесная
Установка на потолкеМаксимальная рабочая скорость Ось J1 85°/с Ось J2 84°/с Ось J3 126°/с Ось J4 156°/с Ось J5 145°/с Ось J6 205°/с Максимальный рабочий диапазон Ось J1 ±180° Ось J2 -150°~+85° Ось J3 -80°~+140° Ось J4 ±360° Ось J5 ±120° Ось J6 ±360° Максимальный радиус активности 2440mm Максимальная нагрузка на конец 100Kg Вес тела 约About730Kg Допустимый крутящий момент J4 690N ·m J5 690N ·m J6 260N ·m Допустимый момент инерции J4 57кг ·м² J5 57кг-м² J6 32кг-м² Повторяемость ±0.1мм Размер основания робота 640×650мм Температура окружающей среды 0~45℃ Относительная влажность 20~80%RH Атмосферное давление (89KPa~106KPa) (Высота ниже 1000м) Вибрация, удар, столкновение <=0.5G Степень защиты (IP54) (Запястье IP67) [[Схема рабочего диапазона]]
[[Схема инерционного тензора соединительной штанги относительно центра масс]]
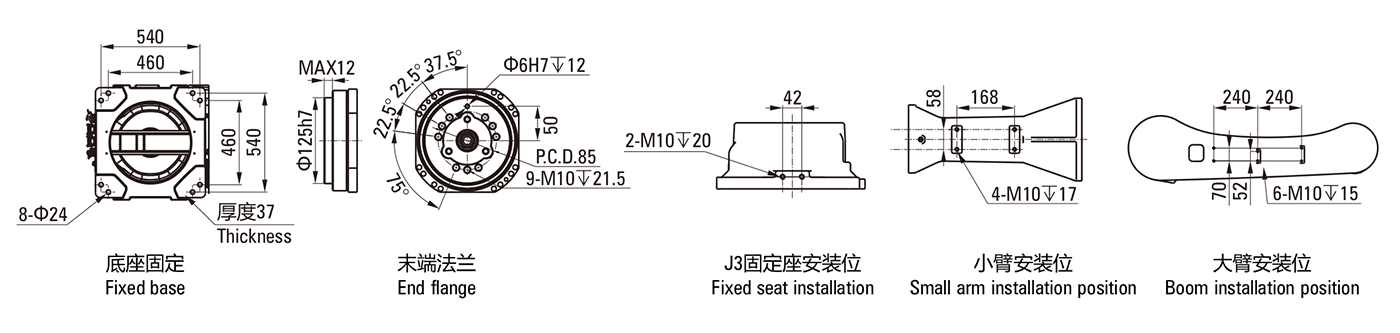
[[Основание]]
[[Компоненты]] [[Фиксированное сиденье малого плеча]] [[Запястье]]
[[Система координат]][[Система координат]] [[5.8×10⁶]]
[[Система координат]][[2.0×10⁷]]
[[Система координат]][[1.3×10⁵]] [[1.8×10⁷]] [[6.8×10⁶]] [[9.9×10⁴]] [[6.0×10⁷]] [[1.1×10⁵]] Coordinate system 4 Coordinate system 5 lxx(Kgmm²) / 5.8×10⁶ 6.7×10⁶ 2.0×10⁷ 2.4×10⁵ 1.3×10⁵ lyy(Kgmm²) / 1.8×10⁷ 6.5×10⁷ 6.8×10⁶ 2.0×10⁵ 9.9×10⁴ lz(Kgmm²) / 2.0×10⁷ 6.0×10⁷ 2.3×10⁷ 1.1×10⁵ 8.6×10⁴ ■ Joint coupling
[[Компоненты]] [[Фиксированное сиденье малого плеча]] [[Запястье]]
[[Система координат]][[Система координат]] Small arm fixed seat
[[Система координат]][[2.0×10⁷]]
[[Система координат]][[1.3×10⁵]] [[1.8×10⁷]] Coordinate system 0 Coordinate system 1 Coordinate system 2 Coordinate system 3 Coordinate system 4 Coordinate system 5 lxx(Kgmm²) / 5.8×10⁶ 6.7×10⁶ 2.0×10⁷ 2.4×10⁵ 1.3×10⁵ lyy(Kgmm²) / 1.8×10⁷ 6.5×10⁷ 6.8×10⁶ 2.0×10⁵ 9.9×10⁴ lzz(Kgmm²) / 2.0×10⁷ 6.0×10⁷ 2.3×10⁷ 1.1×10⁵ 8.6×10⁴ ■ Joint coupling
Joint J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 Coupling relationship equation
(Coupling coefficient)/ / / 80 81 81 ■ Reducer parameters
Model 320CA 500D 160D 80D 60D 42D Reducer reduction ratio 60 52.25 40.25 33 81 81 Comprehensive reduction ratio 210 209 156 151.41 143.53 102.21 Rated output speed(r/min) 15 15 15 15 15 15 Rated torque(N ·m) 3136 4900 1600 784 600 412 Допустимый момент для запуска
и остановки (Н·м)7840 12250 4000 1960 1500 1029 Мгновенный максимальный момент (Н·м) 15680 24500 8000 3920 3000 2058 Моментная жесткость (Н·м) 20580 11000 4000 2150 2000 1660 Мгновенный максимальный момент (Н·м) 39200 22000 8000 4300 4000 3320 ■ Параметры двигателя
Joint J1 J2 J3 J4 J5 J6 Модель двигателя 180 180 180 130 130 130 Номинальная мощность (кВт) 5.5 5.5 4.6 2.5 2.5 1.5 Номинальное напряжение (В) 380 Номинальный ток (А) 22 22 18 6.9 6.9 4.2 Номинальный момент (Н·м) 35 35 29.2 7.96 7.96 4.77 Номинальная скорость (об/мин) 1500 1500 1500 3000 3000 3000 Максимальная скорость (об/мин) 3000 3000 3000 4000 3500 3500 Инерция ротора (*10e-4 кг·м²) 68 68 60 18 18 11 Линия обратной связи
Коэффициент электродвижущей силы (В/Коб/мин)111 111 111 80 80 80 Количество пар полюсов 5 Энкодер 17-битное многократное значение изоляции Tamagawa Сопутствующие товары
СООБЩЕНИЯ
Если у вас есть вопросы, вы можете оставить нам сообщение. У нас есть профессионалы, которые ответят вам. Пожалуйста, заполните правильную Контакты информацию!
Контакты
Нинбо Чжунгда Лидер Интеллектуальные Передачи Лтд.
Добавить.: № 185 Xinxing 1st Road, Цыси высокотехнологичный промышленный
Зона развития, Нинбо
Телефон:86-574-63537171
Факс:86-574-63534879
WhatsApp:86-19136773454
Электронная почта: Trade20@zd-motor.comСледуйте за нами в социальных сетях:





Авторские права©Нинбо Чжунгда Лидер Интеллектуальные Передачи Лтд. Все права защищены.Работает на www.300.cn SEO Бизнес лицензия
-
