
Мы с нетерпением ждем возможности предоставить вам профессиональные услуги.-Лидер Чжунда


-
-
-
Редукторный двигатель переменного тока
ZDF2 、 ZDF3 гипоидный мотор-редуктор
Колесный редуктор RV Cycloidal Pin
ПРОДУКЦИЯ
по слову:Редукторный двигатель переменного тока
Деталь
Режим робота ZDGT5023 Свобода 6 Позиция Наземная установка и подвесная
Установка на потолкеМаксимальная рабочая скорость Ось J1 125°/с Ось J2 110°/с Ось J3 145°/с Ось J4 276°/с Ось J5 259°/с Ось J6 274°/с Максимальный рабочий диапазон Ось J1 ±180° Ось J2 -135°~+100° Ось J3 -80°~+180° Ось J4 ±180° Ось J5 ±115° Ось J6 ±360° Максимальный радиус активности 2340mm Максимальная конечная нагрузка 50Kg Вес тела Около 530 кг Допустимый крутящий момент J4 206 Н·м J5 206 Н·м J6 127 Н·м Допустимый момент инерции J4 28 кг·м² J5 28 кг·м² J6 11 кг·м² Повторяемость ±0.08 мм Размер базы робота 420×620 мм Температура окружающей среды 0~45℃ Относительная влажность 20~80%RH Атмосферное давление 89 кПа~106 кПа (высота ниже 1000 м) Вибрация, удар, столкновение ≤0.5G Степень защиты P54 (Запястье IP67) ■ Диаграмма рабочей области
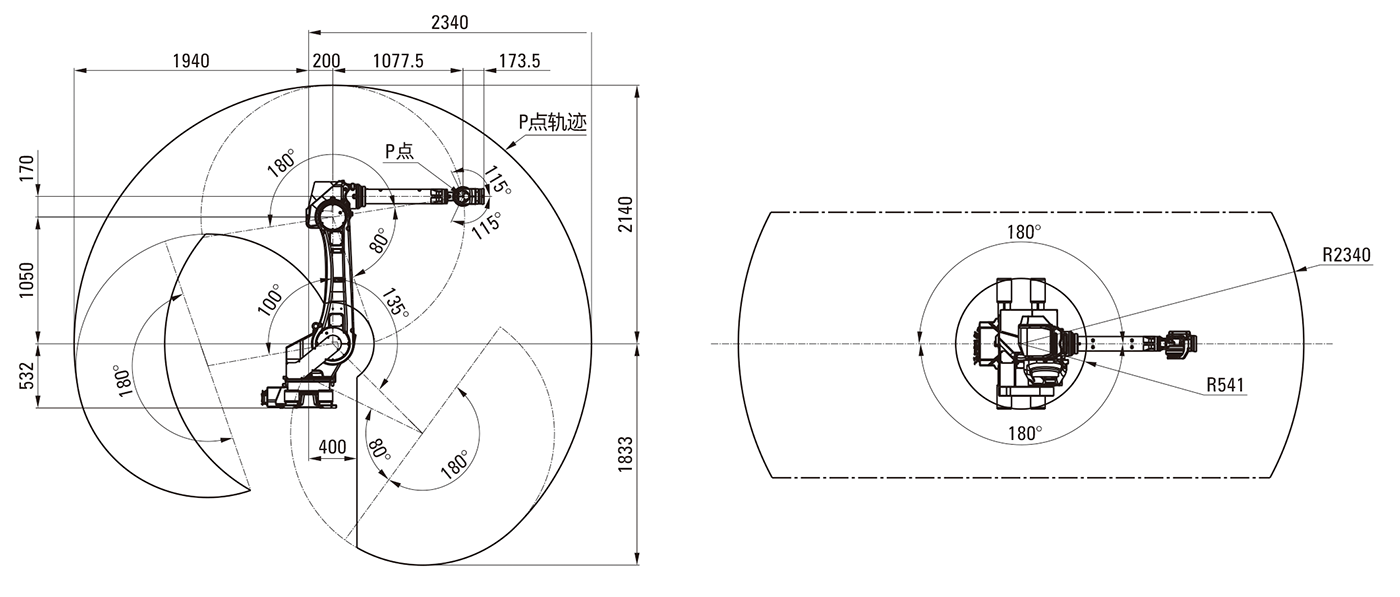
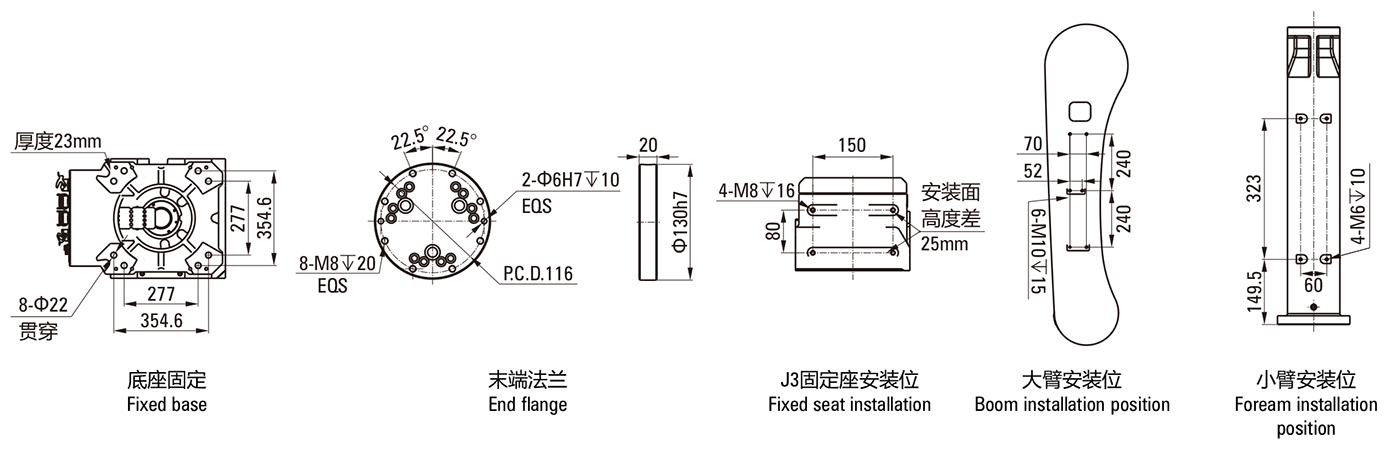
■ Диаграмма интерфейса установки
■ Тензор инерции соединительной штанги относительно центра масс
Объект Основание компоненты Компоненты стрелы Фиксированное сиденье малого плеча
компонентыМалое плечо
компонентыЗапястье Консультироваться Система координат 0 Система координат 1 Система координат 2 Система координат 3 Система координат 4 Система координат 5 lxx(кг·мм²) / 7.0×10⁶ 6.0×10⁶ 1.2×10⁶ 4.8×10⁶ 1.2×10⁵ lyy(кг·мм²) / 8.6×10⁶ 6.2×10⁷ 1.9×10⁶ 4.8×10⁶ 3.9×10⁴ lzz(кг·мм²) / 7.4×10⁶ 5.8×10' 2.4×10⁶ 7.3×10⁴ 9.5×10⁴ ■ Соединение суставов
Сустав J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 Уравнение связи соединения
(Коэффициент связи)/ / / 41 41 41 ■ Параметры редуктора
Модель 200C 380D 120C 80D 42D 35BX Передаточное отношение редуктора 34.86 47.03 36.75 33 41 41 Комплексное передаточное отношение 142.02 162 121.06 86.88 92.7 87.35 Номинальная выходная скорость (об/мин) 15 15 15 15 15 15 Номинальный крутящий момент (Н·м) 1961 3724 1176 784 412 217 Допустимый крутящий момент для запуска
и остановки (Н·м)4900 9310 2450 1960 1029 533 Мгновенный максимальный крутящий момент (Н·м) 9800 18620 4900 3920 2058 1083 Момент жесткости (Н·м) 8820 7050 2450 2150 1660 822 Мгновенный максимальный крутящий момент (Н·м) 17640 14100 4900 4300 3220 1764 ■ Параметры мотора
Сустав J1 J2 J3 J4 J5 J6 Модель мотора 180 180 130 100 100 100 Номинальная мощность (кВт) 4.6 4.6 1.8 1 1 1 Номинальное напряжение (В) 380 Номинальный ток (А) 18 18 6.9 3.7 3.7 3.7 Номинальный крутящий момент (Н·м) 29.2 29.2 11.5 3.18 3.18 3.18 Номинальная скорость (об/мин) 1500 1500 1500 3000 3000 3000 Максимальная скорость (об/мин) 3000 3000 3000 4000 4000 4000 Инерция ротора (*10e-4кгм²) 60 60 18 4.3 4.3 4.3 Линейный возврат
Коэффициент электродвижущей силы (В/Коб/мин)111 111 110 62 62 62 Количество пар полюсов 5 Энкодер 17 бит многократное значение изоляции Tamagawaagreement Сопутствующие товары
СООБЩЕНИЯ
Если у вас есть вопросы, вы можете оставить нам сообщение. У нас есть профессионалы, которые ответят вам. Пожалуйста, заполните правильную Контакты информацию!
Контакты
Нинбо Чжунгда Лидер Интеллектуальные Передачи Лтд.
Добавить.: № 185 Xinxing 1st Road, Цыси высокотехнологичный промышленный
Зона развития, Нинбо
Телефон:86-574-63537171
Факс:86-574-63534879
WhatsApp:86-19136773454
Электронная почта: Trade20@zd-motor.comСледуйте за нами в социальных сетях:





Авторские права©Нинбо Чжунгда Лидер Интеллектуальные Передачи Лтд. Все права защищены.Работает на www.300.cn SEO Бизнес лицензия
-
