
Мы с нетерпением ждем возможности предоставить вам профессиональные услуги.-Лидер Чжунда


-
-
-
Редукторный двигатель переменного тока
ZDF2 、 ZDF3 гипоидный мотор-редуктор
Колесный редуктор RV Cycloidal Pin
ПРОДУКЦИЯ
по слову:Редукторный двигатель переменного тока
Деталь
Модель робота ZDGT1020 Свобода 6 Позиция Наземная установка и подвесная
Установка на потолкеОсь J1 145°/с Максимальная рабочая скорость Ось J2 115°/с Ось J3 150°/с Ось J4 290°/с Ось J5 310°/с Ось J6 310°/с Максимальный рабочий диапазон Ось J1 ±180° Ось J2 -125°~+90° Ось J3 -86°~+202° Ось J4 ±170° Ось J5 ±115° Ось J6 ±360° Максимальный радиус активности 2029mm Максимальная нагрузка на конец 10Kg Вес тела Приблизительно 195 кг Допустимый крутящий момент J4 26 Н·м J5 26N-m J6 11 Н·м Допустимый момент инерции J4 0.90 кг-м² J5 0.90 кг-м² J6 0.30 кг-м² Повторяемость ±0.08 мм Размер основания робота 300×420 мм Температура окружающей среды 0~45℃ Относительная влажность 20~80%RH Атмосферное давление 89 кПа~106 кПа (высота ниже 1000 м) Вибрация, удар, столкновение <=0.5G Степень защиты IP54 (Запястье IP65) [[Рабочая область]](https://example.com)
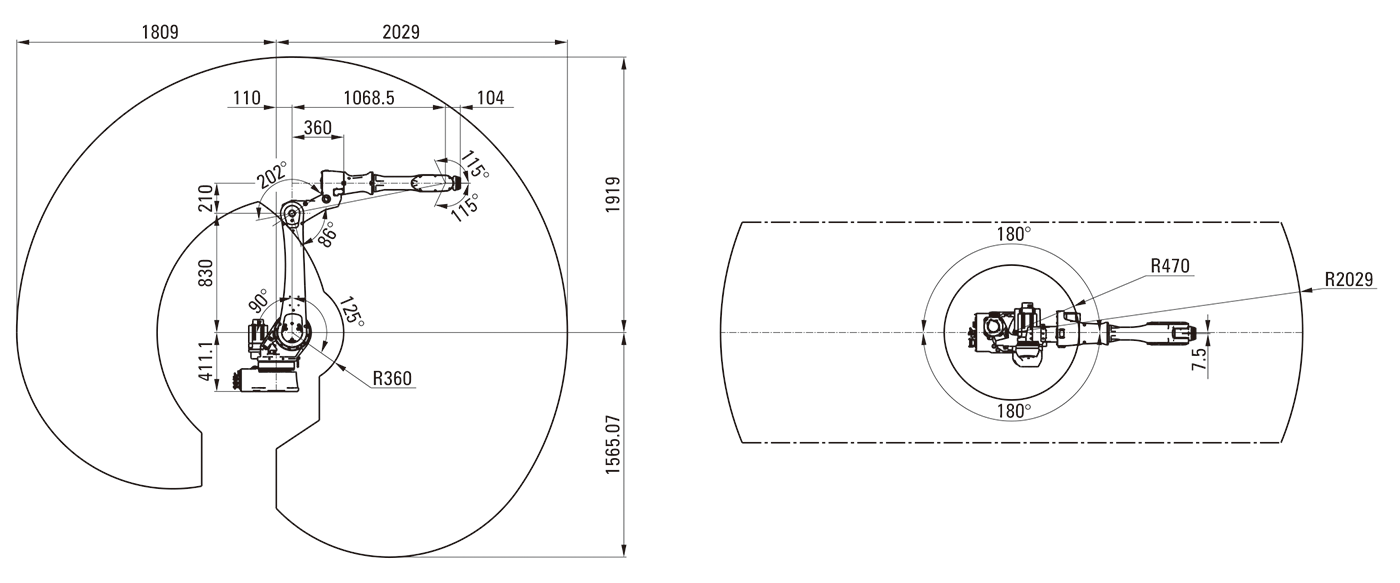
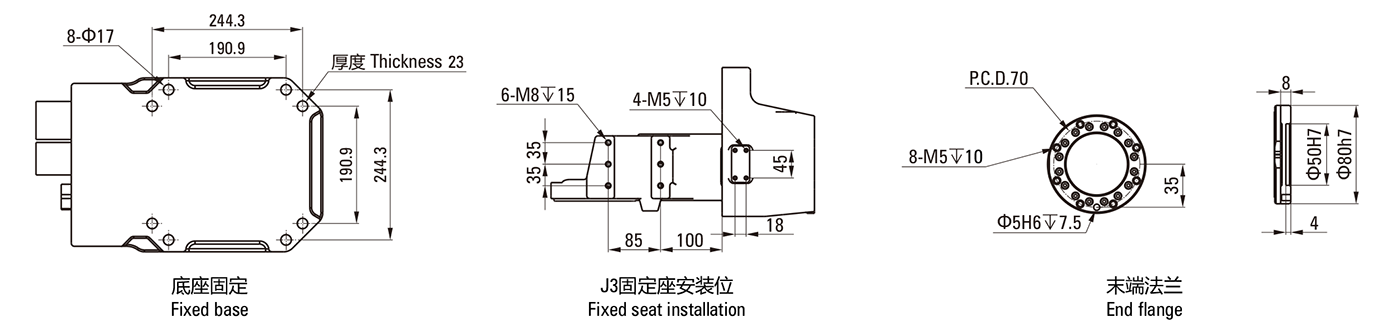
[[Схема интерфейса установки]](https://example.com)
[[Момент инерции соединительной штанги относительно центра масс]](https://example.com)
[[Объект]](https://example.com) [[Основание]](https://example.com) [[Вращающееся сиденье]](https://example.com)
[[Компоненты]](https://example.com)[[Компоненты стрелы]](https://example.com) [[Фиксированное сиденье малого плеча]](https://example.com)
[[Компоненты]](https://example.com)[[Малое плечо]](https://example.com)
[[Компоненты]](https://example.com)[[Запястье]](https://example.com) [[Консультация]](https://example.com) [[Система координат]](https://example.com) [[Система координат]](https://example.com) [[Система координат]](https://example.com) [[Система координат]](https://example.com) [[Система координат]](https://example.com) [[Система координат]](https://example.com) lxx(Kgmm²) / 2.1×10⁶ 9.4×10⁵ 1.0×10⁶ 2.1×10⁶ 1.3×10⁴ lyy(Kgmm²) / 2.7×10⁶ 1.2×10⁷ 5.6×10⁵ 2.1×10⁶ 4.5×10³ lzz(Kgmm²) / 1.6×10⁶ 1.1×10⁷ 1.4×10⁶ 4.5×10⁴ 1.1×10⁴ [[Соединение суставов]](https://example.com)
[[Сустав]](https://example.com) J1-J2 J2-J3 J3-J4 J4-J5 J4-J6 J5-J6 [[Уравнение связи соединения]](https://example.com)
[[Коэффициент связи]](https://example.com)/ / / / / 81 [[Параметры редуктора]](https://example.com)
[[Модель]](https://example.com) 100C 250BX 42D 32 Гармоника 20 Гармоника 20 Гармоника [[Передаточное отношение редуктора]](https://example.com) 36.75 111 105 50 80 80 [[Комплексное передаточное отношение]](https://example.com) 102.9 111 104 102 104.52 104.52 [[Номинальная выходная скорость(r/min)]](https://example.com) 15 15 15 25 25 25 [[Номинальный крутящий момент(N·м)]](https://example.com) 980 1078 412 76 25 25 [[Допустимый крутящий момент для запуска и остановки(N ·м)]](https://example.com)
[[Мгновенный максимальный крутящий момент(N ·м)]](https://example.com)2450 2695 1029 216 56 56 [[Момент жесткости(N ·м)]](https://example.com) 4900 5390 2058 382 98 98 [[Параметры мотора]](https://example.com) 2450 2940 1660 / / / [[Момент жесткости(N ·м)]](https://example.com) 4900 5880 3320 / / / 关Joint
Модель мотора J1 J2 J3 J4 J5 J6 Номинальная мощность(kW) 130 180 130 60 60 60 Rated power(kW) 2 3 1.5 0.4 0.2 0.2 Номинальное напряжение (В) 220 Номинальный ток (А) 10 18 7 2.6 1.4 1.4 Номинальный крутящий момент (Н·м) 6.36 14.3 4.77 1.27 0.63 0.63 Номинальная скорость (об/мин) 3000 2000 3000 3000 3000 3000 Максимальная скорость (об/мин) 3000 2200 3000 4500 4500 4500 Инерция ротора (*10e-4 кг·м²) 16.5 51 9 0.4 0.216 0.216 Линия обратной связи
Коэффициент электродвижущей силы (В/Коб/мин)50.5 52.8 48 33 49.2 49.2 Количество пар полюсов 5 Энкодер 17-битное многократное значение изоляции по соглашению Тамагава Сопутствующие товары
СООБЩЕНИЯ
Если у вас есть вопросы, вы можете оставить нам сообщение. У нас есть профессионалы, которые ответят вам. Пожалуйста, заполните правильную Контакты информацию!
Контакты
Нинбо Чжунгда Лидер Интеллектуальные Передачи Лтд.
Добавить.: № 185 Xinxing 1st Road, Цыси высокотехнологичный промышленный
Зона развития, Нинбо
Телефон:86-574-63537171
Факс:86-574-63534879
WhatsApp:86-19136773454
Электронная почта: Trade20@zd-motor.comСледуйте за нами в социальных сетях:





Авторские права©Нинбо Чжунгда Лидер Интеллектуальные Передачи Лтд. Все права защищены.Работает на www.300.cn SEO Бизнес лицензия
-
